|
ПЃКёЕ№ОЦ(www.nvidia.co.kr)АЁ GTCПЁМ ЦФПюЕЅРЬМЧ И№ЕЈ, ЗЮКИЦННК Хј, GPU АЁМг ЖѓРЬКъЗЏИЎ ФУЗКМЧРЮ ОЦРЬРл ИХДЯЧНЗЙРЬХЭ(NVIDIA Isaac Manipulator)ПЭ ОЦРЬРл ЦлМСХЭ(Isaac Perceptor)ИІ ЙпЧЅЧпДй.
ПЃКёЕ№ОЦ ОЦРЬРл ЗЮКИЦННК ЧУЗЇЦћРК УжНХ Л§МКЧќ AIПЭ АэБо НУЙФЗЙРЬМЧ БтМњРЛ ШАПыЧи AI БтЙн ЗЮКИЦННКИІ АЁМгШЧЯАэ РжДй.
ПЃКёЕ№ОЦ УЂИГРк Ат CEOРЮ СЈНМ ШВ(Jensen Huang)РК 10,000Иэ РЬЛѓРЧ УЛСпРЬ И№РЮ GTC БтСЖПЌМГ ЧіРхПЁМ ШоИгГыРЬЕх ЗЮКП ЧаНРРЛ РЇЧб ЙќПы ЦФПюЕЅРЬМЧ И№ЕЈРЮ ЧСЗЮСЇЦЎ GR00T(Project GR00T)ИІ НУПЌЧпДй. GR00TДТ ‘Generalist Robot 00 Technology’РЧ ОрРкЗЮ, ПЃКёЕ№ОЦ ОЦРЬРл ЗЮКИЦННК ЧУЗЇЦћРЧ ДйОчЧб ХјРЛ ШАПыЧи ШоИгГыРЬЕх ЗЮКППы AIИІ АГЙпЧбДй.
СЈНМ ШВРК "РЯЙн ШоИгГыРЬЕх ЗЮКПРЛ РЇЧб ЦФПюЕЅРЬМЧ И№ЕЈ БИУрРК ПРДУГЏ AI КаОпПЁМ ЧиАсЧиОп Чв АЁРх ШяЙЬЗЮПю ЙЎСІ Сп ЧЯГЊРЬДй. ПЉЗЏ БтМњРЬ ЧЯГЊЗЮ И№ПЉ РќММАш ЖйОюГ ЗЮКП АјЧаРкЕщРЬ РЮАј РЯЙн ЗЮКПРЧ ХЋ ЕЕОрРЛ РЬЗчЕЕЗЯ РЬВјАэ РжДй"Аэ ИЛЧпДй.
ОЦПяЗЏ ПЃКёЕ№ОЦДТ ПЃКёЕ№ОЦ ХфИЃ НУНКХл ПТ ФЈ(Thor system-on-a-chip) БтЙнРЧ ЛѕЗЮПю ШоИгГыРЬЕх ЗЮКППы ФФЧЛХЭИІ АјАГЧпДй. ЖЧЧб ЗЮКП ЧаНРРЛ РЇЧб ОЦРЬРл ЗІ(Isaac Lab), ЧЯРЬКъИЎЕх ХЌЖѓПьЕх ПіХЉЧУЗЮПь ПРФЩНКЦЎЗЙРЬМЧ(hybrid-cloud workflow orchestration)РЛ РЇЧб ПЃКёЕ№ОЦ ПРНКИ№(OSMO)ИІ ЦїЧдЧб ПЃКёЕ№ОЦ ОЦРЬРл ЗЮКП ЧУЗЇЦћРЧ ЛѕЗЮПю ХјЕЕ ЙпЧЅЧпДй. РЬЕщРК ЧСЗЮСЇЦЎ GR00TПЭ ЗЮКППы ЦФПюЕЅРЬМЧ И№ЕЈ АГЙпПЁ СпПфЧб ПЊЧвРЛ Чв АЭРИЗЮ БтДыЕШДй.
ЗЮКП ЦШРЛ РЇЧб ОЦРЬРл ИХДЯЧНЗЙРЬХЭ
ПЃКёЕ№ОЦ ОЦРЬРл ИХДЯЧНЗЙРЬХЭДТ ЗЮКП ЦШ(Robotic Arms)РЛ РЇЧб УжУЗДм И№МЧ Л§МКАњ И№ЕтНФ AI БтДЩРЛ СІАјЧЯИч, АЗТЧб ЦФПюЕЅРЬМЧ И№ЕЈАњ GPU АЁМг ЖѓРЬКъЗЏИЎ ФУЗКМЧРЛ АЎУпАэ РжДй.
ЗЮКИЦННК АГЙпРкДТ ЦЏСЄ РлОїПЁ ИТАд ИТУу МГСЄЕШ МвЧСЦЎПўОю БИМК ПфМвИІ СЖЧеЧи ЗЮКПРЬ СжКЏ ШЏАцРЛ РЮНФЧЯАэ ЛѓШЃ РлПыЧв Мі РжАд ЧбДй. РЬИІ ХыЧи AI И№ЕЈ ШЦЗУАњ РлОї ЧСЗЮБзЗЁЙжРЛ АЁМгШЧи ЕПРћ СЖРл РлОїРЛ РЇЧб ШЎРх АЁДЩЧЯАэ ЙнКЙ АЁДЩЧб ПіХЉЧУЗЮПьИІ БИУрЧв Мі РжДй.
ПЃКёЕ№ОЦРЧ ЗЮКПАњ ПЇСі ФФЧЛЦУ КЮЙЎ КЮЛчРхРЮ Е№ЧЊ ХЛЖѓ(Deepu Talla)ДТ "ЦФПюЕЅРЬМЧ И№ЕЈ Л§МКРЛ РЇЧб ЛѕЗЮПю ХјРЛ ОЦРЬРл ЧУЗЇЦћПЁ ХыЧеЧдРИЗЮНс ДйОчЧб РлОїРЛ МіЧрЧв Мі РжДТ НКИЖЦЎЧЯАэ РЏПЌЧб ЗЮКПРЛ Дѕ КќИЃАд АГЙпЧв Мі РжАд ЕЦДй"Аэ ИЛЧпДй.
ЗЮКП МБЕЕ ОїУМЕщРК ОЦРЬРл ИХДЯЧНЗЙРЬХЭИІ АэАДПЁАд СІАјЧЯБт РЇЧи ПЃКёЕ№ОЦПЭ ЧљЗТЧЯАэ РжДй. ДыЧЅРћРЮ БтОїРИЗЮДТ ОпНКФЋПЭ(Yaskawa), МжЗЮИѓ(Solomon), ЧЧХЉДа ЗЮКИЦННК(PickNik Robotics), ЗЙЕ№ ЗЮКИЦННК(READY Robotics), ЧСЖћФЋ ЗЮКИЦННК(Franka Robotics), ХзЖѓДйРЮ(Teradyne)РЧ РкШИЛч РЏДЯЙіМГ ЗЮКП(Universal Robots) ЕюРЬ РжДй.
ОпНКФЋПЭРЧ ДыЧЅРЮ ИЖЛчШїЗЮ ПРАЁПЭ(Masahiro Ogawa)ДТ "ОпНКФЋПЭРЧ РкЕПШ МжЗчМЧПЁ ПЃКёЕ№ОЦРЧ AI ХјАњ БтДЩРЛ ЕЕРдЧдРИЗЮНс ПьИЎДТ ЛъОї РќЙнПЁ АЩУФ ЗЮКПРЛ ЙшФЁЧв Мі РжДТ СіЦђРЛ ГаШїАэ РжДй. РЬДТ ДйОчЧб ЛъОїПЁ ХЋ ПЕЧтРЛ ЙЬФЅ АЭРИЗЮ ПЙЛѓЕШДй"Аэ ИЛЧпДй.
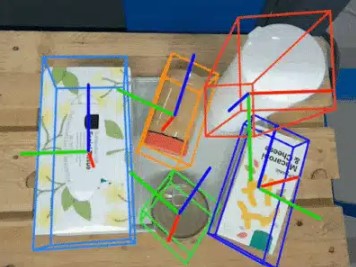
ПЃКёЕ№ОЦДТ БтСИРЧ ЗЮКП СЖРл НУНКХлРЛ КИАЧЯБт РЇЧб ЦФПюЕЅРЬМЧ И№ЕЈРЛ МБКИРЬАэ РжДй. РЬЗЏЧб И№ЕЈЕщРК НКИЖЦЎ СІСЖ, ЧШОиЧУЗЙРЬНК(pick-and-place) РлОї, БтАш СЖРлАњ СЖИГРЛ УГИЎЧЯДТ ЕЅ РжОюМ ДйОчЧб ШЏАцАњ ОжЧУИЎФЩРЬМЧПЁ ИТАд ЗЮКПРЬ АЈСі, РћРР, РчЧСЗЮБзЗЁЙжЧв Мі РжЕЕЗЯ АГЙпЧЯДТ ЕЅ ЕЕПђРЬ ЕЩ АЭРЬДй. РЬЗЏЧб И№ЕЈРК ДйРНАњ ААДй.
ЦФПюЕЅРЬМЧЦїСю(FoundationPose)ДТ БтСИПЁДТ АЈСіЧЯСі ИјЧпДј ЙАУМЕщРЧ 6D ЦїСю УпСЄАњ УпРћРЛ РЇЧб МББИРћРЮ ЦФПюЕЅРЬМЧ И№ЕЈРЬДй.
cuИ№МЧ(cuMotion)РК ПЉЗЏ БЫРћ УжРћШИІ ЕПНУПЁ НЧЧрЧи УжЛѓРЧ МжЗчМЧРЛ СІАјЧбДй. РЬЗЮНс ЛъОї БдИ№РЧ ЗЮКП И№МЧ АшШЙ ЙЎСІИІ ЧиАсЧЯБт РЇЧи ПЃКёЕ№ОЦ GPUРЧ КДЗФ УГИЎ БтДЩРЛ ШАПыЧбДй.
ЦФПюЕЅРЬМЧБзЗІ(FoundationGrasp)РК ЙЬСіРЧ 3D ЙАУМПЁ ДыЧи БэРЬ РжАд ЦФОЧЧЯАэ ПЙУј БтДЩРЛ МіЧрЧЯДТ ЦЎЗЃНКЦїИг БтЙн И№ЕЈРЬДй.
НХММЦМФЋDETR(SyntheticaDETR)РК НЧГЛ ШЏАцРЛ РЇЧб ЙАУМ АЈСі И№ЕЈЗЮ, ЛѕЗЮПю ЙАУМИІ Дѕ КќИЃАд АЈСі, ЗЛДѕИЕ, ШЦЗУЧв Мі РжДй.
ОЦРЬРл ЦлМСХЭЗЮ РкРВ РЬЕП ЗЮКППЁ НУАЂ AI СІАј
СІСЖПЭ СжЙЎ УГИЎ РлОїПЁМ ШПРВМКАњ РлОїРк ОШРќРЛ АГМБЧЯАэ ПРЗљРВАњ КёПыРЛ СйРЬБт РЇЧи РкРВ РЬЕП ЗЮКП(AMR, autonomous mobile robot)РЛ УЄХУЧЯАэ РжДй.
ОЦРЬРл ЦлМСХЭДТ ИжЦМ ФЋИоЖѓ, 360ЕЕ КёРќ БтДЩРЛ СІАјЧбДй. РЬИІ ХыЧи ОЦХЉКЃНКЦЎ(ArcBest), BYD, ХАПТ БзЗь(KION Group)Ањ ААРК УЪБт ОїАш ЦФЦЎГЪПЁАд РкРч УыБо РлОїРЛ СіПјЧЯДТ РкРВ РЬЕП ЗЮКП МГФЁИІ РЇЧб АэБо НУАЂ AIИІ СІАјЧбДй.
ПЃКёЕ№ОЦДТ ММБзПўРЬ ЗЮКИЦННК(Segway Robotics)ПЭ ЗЙПРЦФЕх РЬЙЬТЁ(Leopard Imaging)Ањ ЧљЗТЧи ПЃКёЕ№ОЦ ГыЙй ПРИА ЕЅКъХА(Nova Orin DevKi)ИІ АГЙпЧпДй. РЬИІ ХыЧи БтОїЕщРК ОЦРЬРл ЦлМСХЭРЧ АГЙп, АЫСѕ, ЙшЦїРЧ АњСЄРЛ НХМгЧЯАд УГИЎЧв Мі РжДй.
ОЦХЉКЃНКЦЎРЧ УжАэ ЧѕНХ УЅРгРкРЬРк ОЦХЉКЃНКЦЎ ХзХЉГюЗЮСіНК(ArcBest Technologies)РЧ ДыЧЅРЮ ИЖРЬХЌ ДКНУЦМ(Michael Newcity)ДТ "ОЦХЉКЃНКЦЎДТ ЙАЗљ КаОпПЁ УжУЗДм ИгНХ КёРќ БтМњРЛ ЕЕРдЧЯБт РЇЧи ПЃКёЕ№ОЦПЭ ЧљЗТЧЯАэ РжДй. КЙНК НКИЖЦЎ ПРХфГыЙЬ(Vaux Smart Autonomy) AMR СіАдТїПЭ ИЎФЁ ЦЎЗАПЁ ОЦРЬРл ЦлМСХЭ ЧУЗЇЦћРЛ ЛчПыЧЯИщ УЂАэ, РЏХы МОХЭ, СІСЖ НУМГРЧ РкРч УыБо ЧСЗЮММНКПЁМ РхОжЙА АЈСіИІ РЇЧб РЮНФ, РЧЙЬ РЮНФ ГЛКёАдРЬМЧ, 3D ИХЧЮРЛ АГМБЧв Мі РжДй"Аэ ИЛЧпДй.
ШоИгГыРЬЕх ЗЮКП АГЙпРЛ РЇЧб ЧСЗЮСЇЦЎ GR00T
GTC 2024ПЁМ НУПЌЕШ GR00T БтЙн ШоИгГыРЬЕх ЗЮКПРК ХиНКЦЎ, КёЕ№ПР, ЕЅИ№ Ею ДйОчЧб ЧќХТРЧ СіНУИІ МіНХЧв Мі РжРЛ ЛгИИ ОЦДЯЖѓ РЬРќ ЛѓШЃРлПыРЛ РЬПыЧи ЗЮКПРЬ ПјЧЯДТ ЕПРлРЛ МіЧрЧв Мі РжДй. ПЃКёЕ№ОЦДТ ОюСњИЎЦМ ЗЮКИЦННК(Agility Robotics), ОлЦЎЗЮДа(Apptronik), ЧЊИЎПЁРЮХкИЎРќНК(Fourier Intelligence), РЏДЯЦЎИЎ ЗЮКИЦННК(Unitree Robotics)РЧ ШоИгГыРЬЕх ЗЮКП 4СОПЁ ХОРчЕШ GR00TИІ МБКИПДДй.
ШоИгГыРЬЕх ЗЮКПРК АэСжЦФ РњЗЙКЇ СІОю, МОМ РЖЧеАњ РЮНФ, РлОї АшШЙ, РЮАЃАњ ЗЮКПРЧ ЛѓШЃ РлПы ЕюРЧ ПфБИИІ УцСЗЧЯБт РЇЧи РЬБтСО ФФЧЛЦУ(heterogeneous computing)РЬ ЧЪПфЧб КЙРтЧб НУНКХлРЬДй. ПЃКёЕ№ОЦДТ ПЃКёЕ№ОЦ ХфИЃ SoCПЁ БтЙнЧб ЛѕЗЮПю ШоИгГыРЬЕх ЗЮКППы СЌНМ ХфИЃ(Jetson Thor) ХОРч ФФЧЛХЭИІ АјАГЧпДй.
СЌНМ ХфИЃДТ ПЃКёЕ№ОЦ КэЗЂРЃ(Blackwell) ОЦХАХиУГ БтЙнРЧ ТїММДы GPUПЭ 800ХзЖѓЧУЗгНКРЧ 8КёЦЎ КЮЕП МвМіСЁ AI МКДЩРЛ СІАјЧЯДТ ЦЎЗЃНКЦїИг ПЃСјРЛ АЎУшДй. РЬИІ ХыЧи GR00TПЭ ААРК ИжЦМИ№До Л§МКЧќ AI И№ЕЈРЛ НЧЧрЧв Мі РжДй. ЖЧЧб ХыЧе БтДЩ ОШРќ ЧСЗЮМММ, АэМКДЩ CPU ХЌЗЏНКХЭПЭ 100GBРЧ РЬДѕГн ДыПЊЦјРЛ ХыЧи МГАшПЭ ХыЧе РлОїРЛ ХЉАд АЃМвШЧбДй.
ЧСЗЮСЇЦЎ GR00TДТ ЗЮКП АГЙпРкАЁ ЦФПюЕЅРЬМЧ И№ЕЈРЛ БИУрЧЯАэ ХзНКЦЎЧЯБт РЇЧи ЛчПыЧв Мі РжДТ ОЦРЬРл ЕЕБИИІ ЛчПыЧбДй. ПЉБтПЁДТ ШоИгГыРЬЕх ЗЮКП И№ЕЈРЛ ДыБдИ№ЗЮ ШЦЗУЧЯБт РЇЧи ОЦРЬРл НЩ(Isaac Sim)ПЁ ГЛРхЕШ ЛѕЗЮПю АцЗЎ НУЙФЗЙРЬМЧ ОлРЮ ОЦРЬРл ЗІРЬ ЦїЧдЕШДй. ЖЧЧб, ШЦЗУАњ НУЙФЗЙРЬМЧ ПіХЉЗЮЕх АќИЎПы ХЌЖѓПьЕх ПіХЉЧУЗЮПь ПРФЩНКЦЎЗЙРЬМЧ ЧУЗЇЦћРЮ ПРНКИ№ЕЕ ЧдВВ ЦїЧдЕШДй.
ОЦРЬРл ЗІРИЗЮ ЗЮКП ЧаНР АЁМгШЧЯБт
АШБтГЊ РтБт ЕюРЧ АэБо РЬЕП БтМњРЬ ЧЪПфЧб ЗЮКПРК НУЙФЗЙРЬМЧ ШЏАцПЁМ НЩУў АШ ЧаНРРЛ ЛчПыЧЯАэ АЁЛѓ ШЏАцПЁМ ЙнКЙРћРИЗЮ ШЦЗУЧи БтМњРЛ РЭЧєОп ЧбДй. БзЗЏГЊ БзЗИАд И№ЕЈРЬ НРЕцЧб БтМњРЧ РЏПыМКРК НЧСІ ЗЮКП ПюПы ШЏАцПЁ РћПыЕЩ ЖЇ ДѕПэ СјАЁАЁ ЙпШжЕЧИч, РЬДТ ЧСЗЮСЇЦЎ GR00TИІ ХыЧи РдСѕЕЦДй.
ОЦРЬРл Сќ(Isaac Gym)РЧ ШФМгРлРЮ ОЦРЬРл ЗІРК ЙАИЎ БтЙнРЧ ЛчНЧРћРЮ РЮНФ БтЙн АШ ЧаНР РлОїРЛ РЇЧи ПЃКёЕ№ОЦ ПШДЯЙіНК(Omniverse) БтМњРЛ ШАПыЧбДй. ОЦРЬРл ЗІРК ОЦРЬРл НЩ ЧУЗЇЦћПЁ БИУрЕШ ЗЮКП ЧаНРПы ПРЧТ МвНК ОжЧУИЎФЩРЬМЧРИЗЮ, МКДЩПЁ УжРћШЕХ РжДй. РЬ ОжЧУИЎФЩРЬМЧПЁДТ АШ ЧаНР APIПЭ АГЙпРк ФЃШРћРЮ РлОї ЧСЗЙРгПіХЉАЁ ХыЧеЕШДй.
ПЃКёЕ№ОЦ ПРНКИ№ЗЮ ХЌЖѓПьЕх ГзРЬЦМКъ ЗЮКИЦННК ПіХЉЧУЗЮПь НКФЩСйИЕ ШАМКШЧЯБт
ПЃКёЕ№ОЦ ПРНКИ№ДТ КаЛъ ШЏАц РќЙнПЁМ ПіХЉЗЮЕхИІ ШЎРхЧбДй. КЙРтЧЯАэ ДйОчЧб ДмАшИІ ЦїЧдЧЯДТ РлОїРЬ ПфБИЕЧДТ ЗЮКИЦННК КаОпРЧ АцПь, РЬ ЧУЗЇЦћРК РЇФЁПЁ БИОжЙоСі ОЪАэ ЙшФЁЧв Мі РжДТ ПЩМЧАњ ЙшФЁЕШ И№ЕЈПЁ ДыЧб ЕЅРЬХЭ ММЦЎ АќИЎПЭ УпРћ БтДЩРЛ СІАјЧбДй.
КИНКХЯ ДйРЬГЛЙЭНК(Boston Dynamics)РЧ ИгНХ ЗЏДзАњ РЮНФ УЅРгРкРЮ Цж ИХИЎО№(Pat Marion)РК "КИНКХЯ ДйРЬГЛЙЭНКДТ ЗЮКПРЛ БИЕПЧЯБт РЇЧи ДйОчЧб ИгНХ ЗЏДз, АШ ЧаНР, AI БтМњРЛ ШАПыЧЯАэ РжДй. ДыБдИ№ ЦЎЗЙРЬДз ПіХЉЗЮЕхИІ ШПАњРћРИЗЮ АќИЎЧЯБт РЇЧи ПьИЎДТ ПЃКёЕ№ОЦ ПРНКИ№ РЮЧСЖѓ МжЗчМЧРЛ ЛчПыЧЯАэ РжДй. РЬДТ ИгНХ ЗЏДз ПЃСіДЯОюЕщРЬ ПіХЉЧУЗЮПьИІ АЃМвШЧЯАэ РкНХРЧ РќЙЎМКРЛ БюДйЗЮПю ЗЮКП АјЧа ЙЎСІИІ ЧиАсЧЯДТ ЕЅ РќГфЧЯАд ЕЕПЭСиДй"Аэ ИЛЧпДй.
ПЙИІ ЕщОю ПРНКИ№ДТ ШЦЗУРЛ РЇЧи ПЃКёЕ№ОЦ DGXПЁМ И№ЕЈРЛ НЧЧрЧЯАэ, НУЙФЗЙРЬМЧПЁМ ЖѓРЬКъ АШ ЧаНРРЛ РЇЧи ПЃКёЕ№ОЦ OVX МЙіИІ ЕПНУПЁ НЧЧрЧЯИч GR00TИІ СіПјЧбДй. РЬ ПіХЉЗЮЕхПЁДТ ЙнКЙРћРИЗЮ И№ЕЈРЛ Л§МКЧЯАэ ШЦЗУЧЯДТ РлОїРЬ ЦїЧдЕШДй. КаЛъ ШЏАц РќЙнПЁМ ПіХЉЗЮЕхИІ АќИЎЧЯАэ ПЙОрЧЯДТ ПРНКИ№РЧ БтДЩРЛ ХыЧи DGXПЭ OVX НУНКХлРЛ ПјШАЧЯАд СЖСЄЧв Мі РжДй. РЬДТ ШПРВРћРЬАэ ЙнКЙРћРЮ И№ЕЈ АГЙпРЛ АЁДЩЧЯАд ЧбДй. И№ЕЈРЬ ХзНКЦЎПЭ АЫСѕРЛ РЇЧб СиКёАЁ ПЯЗсЕЧИщ ПРНКИ№ДТ OVX(x86-64)РЧ МвЧСЦЎПўОю РЮДѕЗчЧС(software-in-the-loop, SIL) ПіХЉЧУЗЮПьПЭ ПЃКёЕ№ОЦ СЌНМ (aarch64) ФФЧЛЦУ ИЎМвНКИІ ЛчПыЧб ЧЯЕхПўОю РЮДѕЗчЧС(hardware-in-the-loop, HIL) ПіХЉЧУЗЮПьИІ ЕЖРкРћРИЗЮ СЖРВЧв Мі РжДй.
АГЙпРкИІ РЇЧб ROS ПЁФкНУНКХл СіПј
ПЃКёЕ№ОЦДТ ПРЧТ МвНК ЗЮКИЦННК ОѓЖѓРЬО№НК(OSRA, Open Source Robotics Alliance) СЖСїРЧ УЂИГ ИтЙіРЬРк ЧУЗЁЦМГб НКЦљМЗЮ ЧеЗљЧпДй. OSRAДТ ЗЮКП ПюПЕ УМСІ(ROS)ИІ КёЗдЧб ПЉЗЏ ПРЧТ МвНК ЗЮКП ЧСЗЮСЇЦЎИІ СіПјЧбДй. РЬЕщРК ЗЮКИЦННК ФПЙТДЯЦМРЧ ЧљОї, ЧѕНХ, БтМњ СіФЇРЛ УЫСјЧЯБт РЇЧб ‘ПРЧТ МвНК ЗЮКИЦННК РчДм(OSRF, Open Source Robotics Foundation)’РЬ НУРлЧб ЛѕЗЮПю ЧСЗЮСЇЦЎРЬДй.
ПРЧТ ЗЮКИЦННК(Open Robotics)РЧ CEOРЮ ЙйГзЛч ОфСИ ПРИЃНУ(Vanessa Yamzon Orsi)ДТ "РкРВ ЗЮКПРЧ БтДЩРЬ ЧтЛѓЕЪПЁ ЕћЖѓ Дѕ АЗТЧЯИщМЕЕ ПЁГЪСі ШПРВРћРЮ ПТКИЕх ФФЧЛЦУПЁ ДыЧб МіПфАЁ СѕАЁЧЯАэ РжДй. ROS ФПЙТДЯЦМДТ РЬЗЏЧб МіПфИІ СїСЂ АцЧшЧЯАэ РжРИИч, ПьИЎ ЛчПыРкЕщРК СЁСЁ Дѕ ПЃКёЕ№ОЦПЭ ААРК ОїАш ИЎДѕРЧ АэБо АЁМг ФФЧЛЦУ ЧЯЕхПўОюИІ ШАПыЧЯАэ РжДй”Аэ ИЛЧпДй. |